
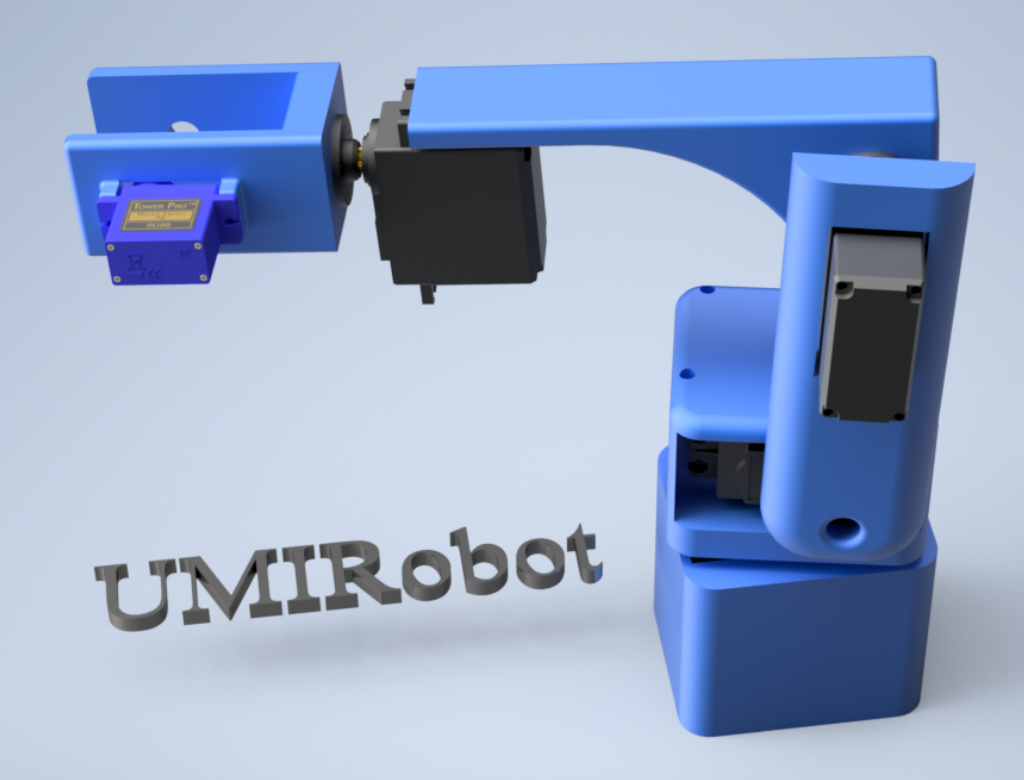
UMIRobot
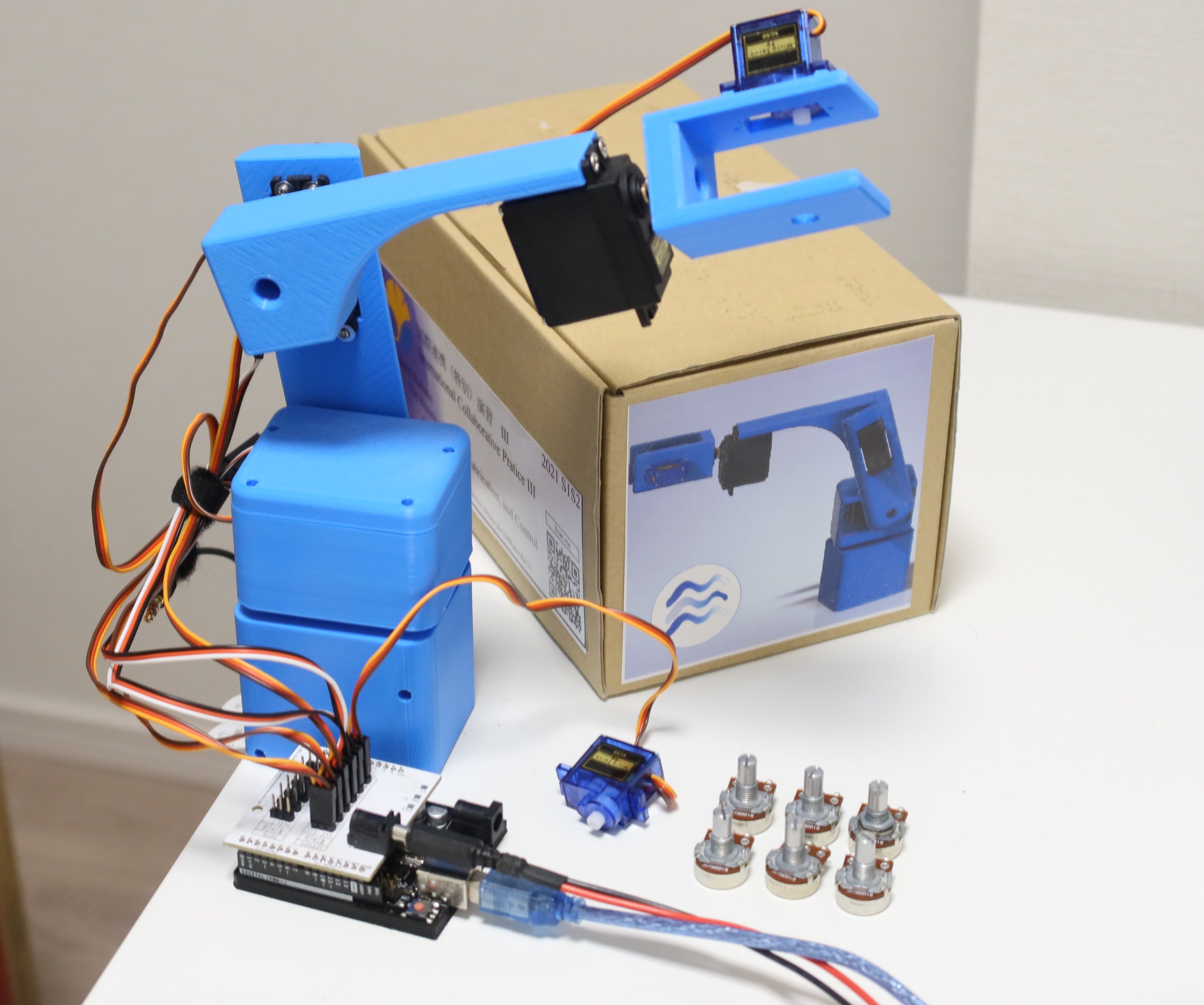
The UMIRobot is an open {hardware, software} (5+1) robotic platform developed for online and hybrid learning courses. The (under)graduate level students are divided into groups and must design a gripper and a master control.
The paper about the UMIRobot was presented at the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems in Detroit
Mechanical
The 3D-printer-friendly files of the UMIRobot, along with instructions, are shared over at Thingiverse.
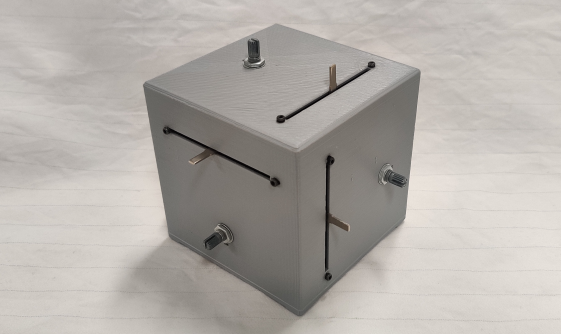
Sample master interface CAD files (by Jiawei Zhao) (link). Latest model available at thingiverse.
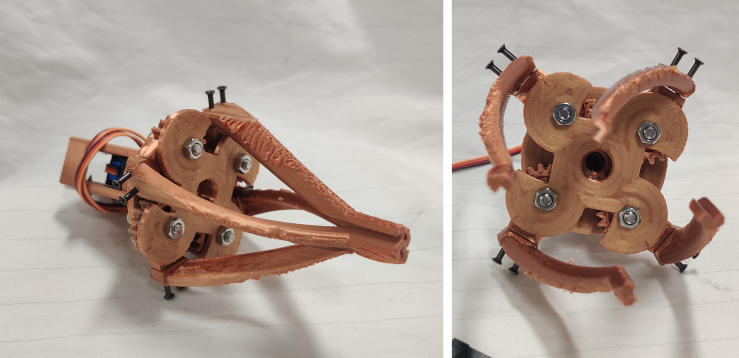
Sample gripper CAD files (by Jiawei Zhao) (link). Latest model available at thingiverse.
Software
There are two main software components related to the UMIRobot.
- This should be installed in your Arduino: umirobot-arduino
- This should be installed on the computer connected to the Arduino: umirobot-py
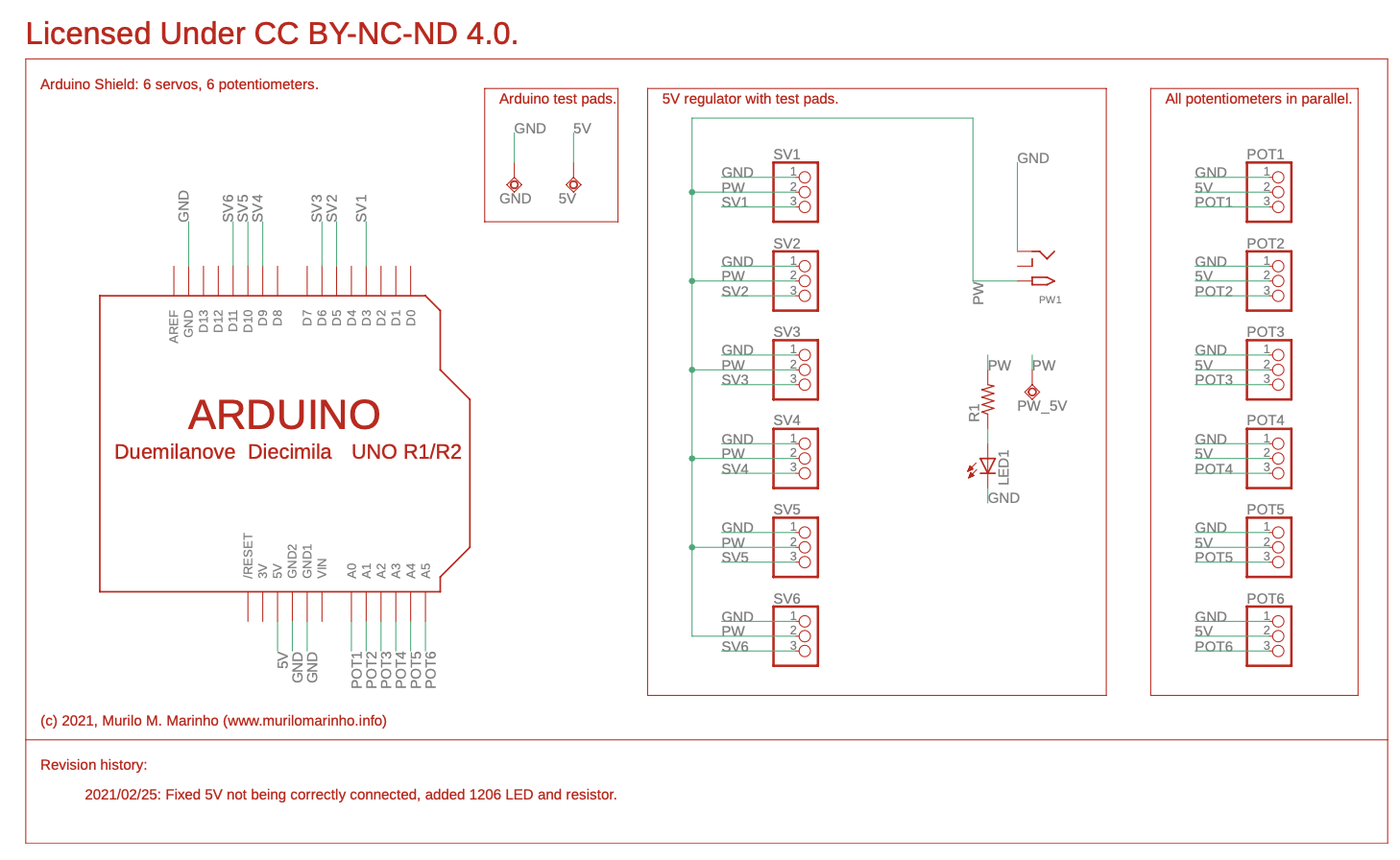
Electronic
Featured video: Japan <-> Bangladesh Teleoperation
An intercontinental teleoperation experiment between Japan and Bangladesh. Using the UMIRobot and parts designed in this class.

Past Teleoperation Challenge winners by category
| Year/Semester | Best gripper | Best master | Smoothest teleoperation | Best presentation |
|---|---|---|---|---|
| 2022/Autumn | Mechanical Mustangs | Sleepy-Swiss Warmblood | Running Mustangs | Sleepy-Swiss Warmblood |
| 2022/Spring | Max-Mini Rex | Max-Mini Rex | Max-Mini Rex | Curious Lionhead |
| 2021/Autumn | Inteligent Calicos | Inteligent Calicos | Inteligent Calicos | Curious Chaussies |
| 2021/Spring | Unparalleled Shibas | Beady Beagles | Unparalleled Shibas | Unparalleled Shibas |
Teleoperation Challenge Videos

License
Mechanical files: CC BY-NC-ND 4.0.
Software: GPLv3.
Note: The copyright for the student’s designs remains with them.